Sur 32 doctorants inscrits, Guillaume Coiffier, doctorant au sein de l’équipe, fait partie des 11 finalistes présélectionnés pour la 10ème édition de l’Université de Lorraine au concours Ma thèse en 180 secondes.
Toute l’équipe est impatiente d’assister au pot pour fêter sa victoire lors de la finale qui aura lieu le jeudi 10 mars 2022 ! 😉
This course explains least squares optimization, nowadays a simple and well-mastered technology. We show how this simple method can solve a large number of problems that would be difficult to approach in any other way. This course provides a simple, understandable yet powerful tool that most coders can use, in the contrast with other algorithms sharing this paradigm (numerical simulation and deep learning) which are more complex to master.
Notre article Foldover-free maps in 50 lines of code sera présenté à SIGGRAPH du 9 au 13 août !
Du 9 au 13 août aura lieu la très sélective conférence SIGGRAPH, rendez-vous international sur l’infographie et les techniques interactives. Des chercheurs de l’équipe Pixel y animeront un cours de 3 heures et détailleront leur solution a un problème fondamental de modélisation géométrique. Le fruit de travaux menés avec leurs homologues russes.
Un problème de plus de 50 ans résolu sur 50 lignes de code
« Une avancée majeure qui donne des résultats spectaculaires » : voilà comment Dmitry Sokolov, enseignant-chercheur au LORIA et responsable de l’équipe Pixel, qualifie les résultats qu’il s’apprête à présenter aux scientifiques, ingénieurs, industriels, programmeurs ou professionnels du cinéma et du jeu vidéo réunis lors de SIGGRAPH (Special interest group on computer graphics and interactive techniques), la plus grande conférence mondiale sur l’infographie. « Ce que nous avons résolu ici n’est pas simplement destiné à une niche obscure, les répercussions se retrouveront dans de nombreux domaines de la simulation numérique », assure Dmitry Sokolov. Trois chercheurs russes (Vladimir Garanzha, Igor Kaporin, et Liudmila Kudryavtseva) du FRC CSC RAS (Federal research center computer science and control) de Moscou et du MIPT (Moscow institute of physics and technology), et l’équipe PIXEL ont en effet résolu un problème fondamental de modélisation géométrique posé dans les années 1960. Destiné à faciliter l’automatisation du maillage, le code informatique de leur trouvaille est d’ores et déjà accessibles à tous. Double récompense pour les auteurs : leurs travaux vont aussi être publiés dans la prestigieuse revue ACM Transaction on Graphics.
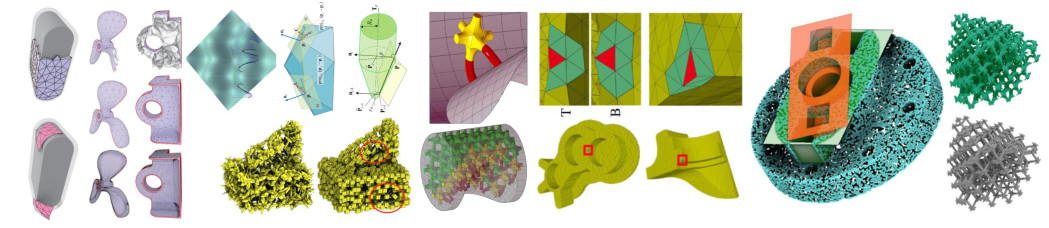
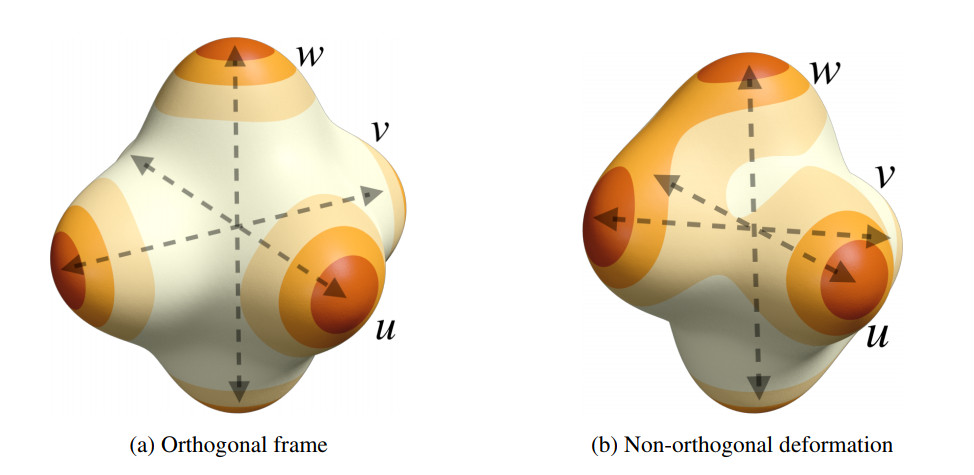
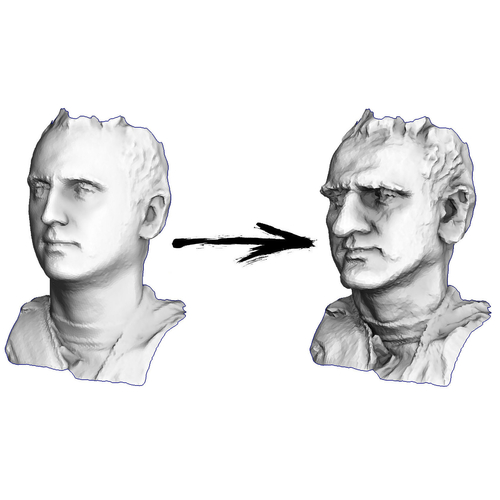
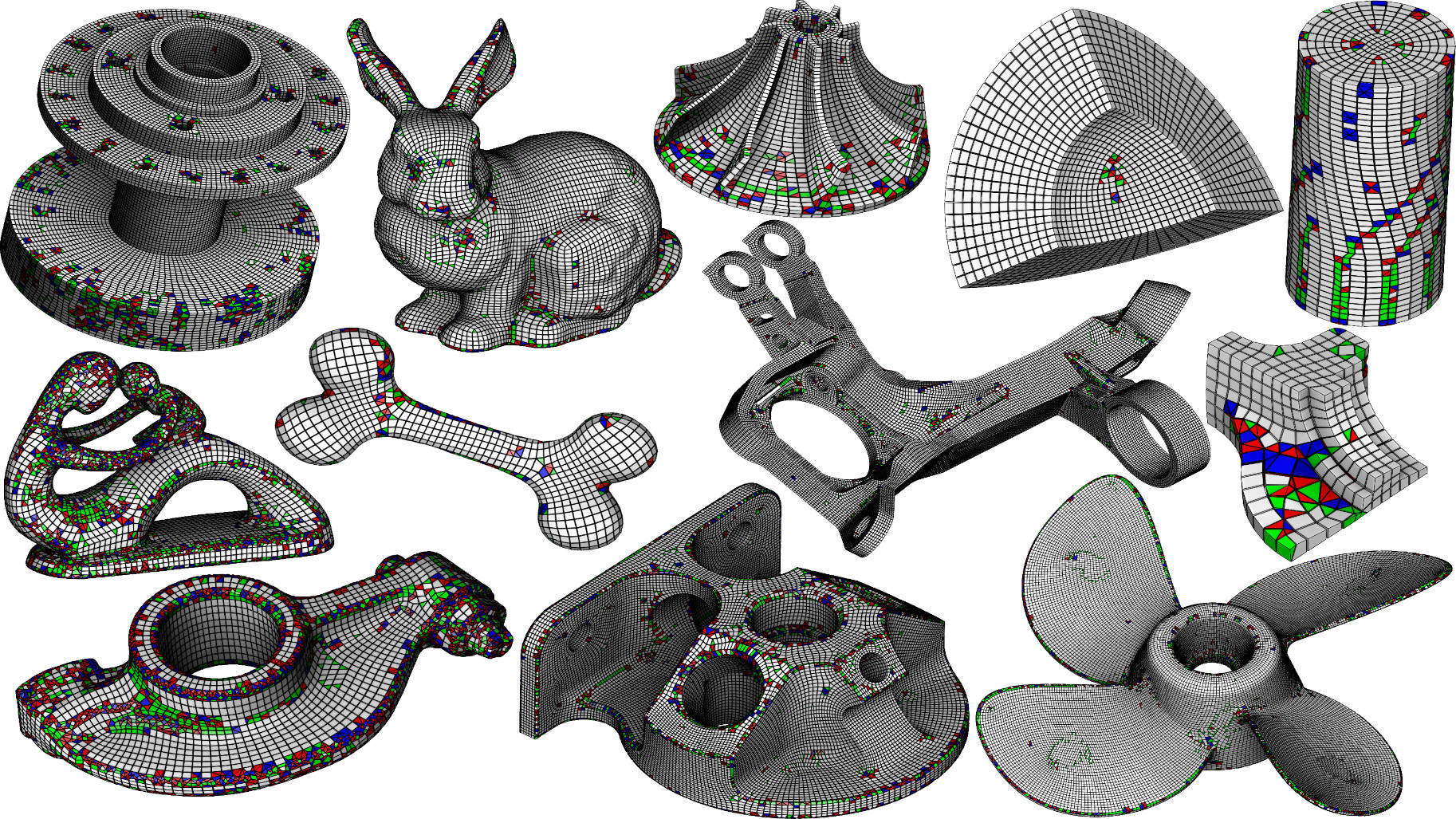
La barre de la robustesse des méthodes de cartographie rehaussée “Complexe et chronophage“, le maillage est une partition de l’espace en cellules élémentaires. Il permet une représentation numérique de phénomènes et de formes physiques. La difficulté réside dans le fait qu’il est presque impossible d’automatiser le processus. “En cause, de nombreuses contraintes, notamment liées à l’enchevêtrement, et une infinité de cas particuliers qui rendent la modélisation délicate“, détaille Dmitry Sokolov. Les chercheurs de Pixel et leurs homologues russes sont parvenus à contourner le problème en s’appuyant sur la théorie de l’élasticité : « En modifiant la structure même du maillage, les contraintes disparaissent de fait. » Ces travaux permettront une semi-automatisation voire une automatisation complète de la conception du maillage. Une avancée majeure pour la communauté du traitement numérique et géométrique mais aussi pour de nombreux industriels, parmi lesquels ceux de l’automobile et du cinéma d’animation. Cette réussite répond également à la volonté de Pixel : s’affirmer comme un relai entre la recherche fondamentale et les industriels. « Nous essayons de développer des applications robustes et durables qui seront efficaces dans tous les cas de figures. »
Accéder à l’article dans l’archive ouverte Hal :
Vladimir Garanzha, Igor Kaporin, Liudmila Kudryavtseva, François Protais, Nicolas Ray, et al.. Foldover-free maps in 50 lines of code. 2021. https://hal.archives-ouvertes.fr/hal-03127350